
喜报 | 我校研究生在第三届中国研究生机器人创新设计大赛中荣获佳绩
2021年8月23—25日,由华中科技大学、武汉市委组织部(武汉市招才局)、武汉东湖新技术开发区管理委员会共同承办的第三届中国研究生机器人创新设计大赛全国总决赛在线上举行。我校选派的研究生团队荣获全国二等奖2项,全国三等奖3项,刘超老师荣获优秀指导教师,我校荣获优秀组织奖。
比赛概况
“第三届中国研究生机器人创新设计大赛”是“中国研究生创新实践系列大赛”主题赛事之一。大赛按照创意作品的成熟度和技术特点分成仿真组、部件组、集成组和医疗健康专项组四类,涉及先进工业机器人、医疗机器人、助老助残服务机器人等机器人技术及其应用的多个领域。
获奖团队风采展示
团队名称:在赶ddl
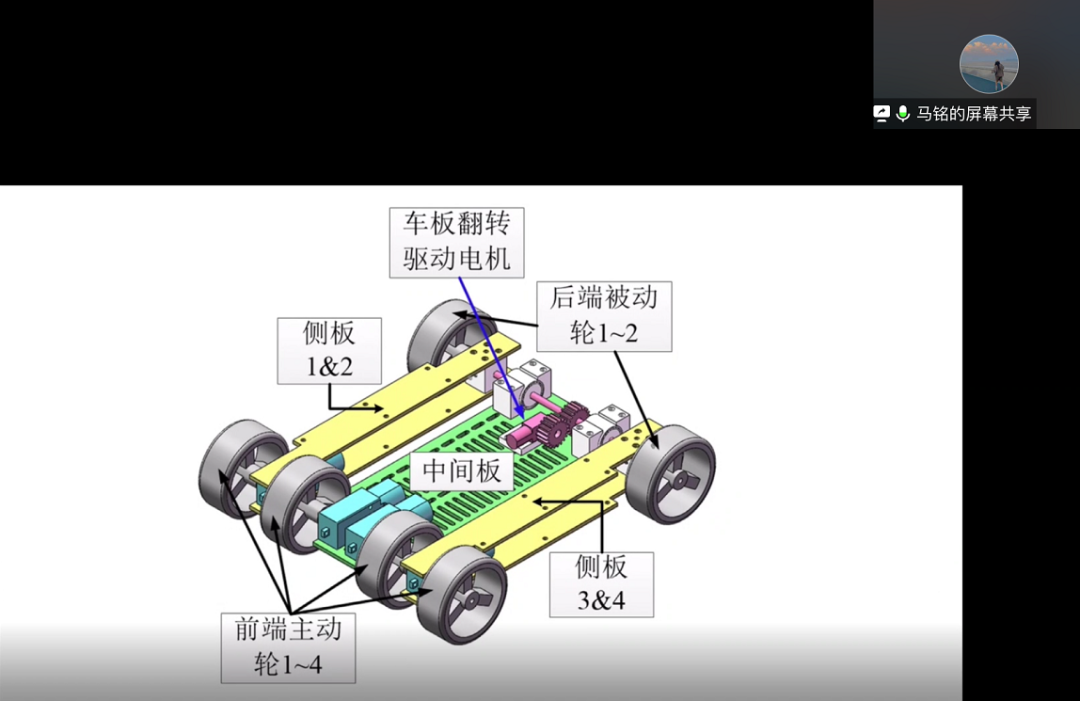
作品名称:一种可折展重构变轮距全地形车
指导教师:陈光荣、郭盛
队员:马铭、杨新华、鲍俊宇、卢华风
作品介绍:将传统轮式机器人固定的底盘转换为通过电机驱动的实现绕轴相互转动的主动板及两侧板,通过小车的折展动作实现形态、轮距可变功能,完成跨越沟壑、爬或穿过限高杆、爬楼梯、穿越管道、爬夹缝等复杂运动仿真,提高轮式机器人对复杂地形的适应性。
奖项:全国二等奖

团队名称:RigSoft_Rob
作品名称:变刚度仿生连续体机器人系统设计
指导教师:郭盛
队员:汪培义
作品介绍:针对传统连杆机器人存在的关节数目和自由度有限、刚性结构及灵活性较差等缺点;同时为了解决现有连续体机器人柔度较大、难以开展远端较大负载任务等弊端,设计一种具有双曲率变形和变刚度特性的仿生连续体机器人,使其具有非结构环境下的灵活运动及远端变刚度操作特性,能够在复杂的深腔未知环境中实现运动和变刚度的自由切换控制。
奖项:全国二等奖
团队名称:知行机器人战队
作品名称:基于冗余结构的六自由度串并联混合加工机器人
指导教师:曲海波
队员:薛源、王啸宇、杨选定、刘凤林、王新智
作品介绍:提出了一种全新的串并联混合机器人构型,并将其运用于加工机器人领域中。与传统加工机器人相比,其工作空间更大,基于不同的任务改变构型进而提高刚度,并且冗余驱动使得机器人的容错性得到进一步提升。
奖项:全国三等奖


团队名称:奔跑队
作品名称:可变形轮腿式变胞机器人
指导教师:刘超
队员:付志洋、马建鹏、卢莹香、谭稀岑
作品介绍:将Chebyshev连杆机构和平行四边形机构相结合,构造出单驱动变形轮腿式机器人,两种模式均使用同一驱动,解决了现有大部分轮腿机器人腿式模式和轮式模式单独驱动所需驱动数目多的问题。腿式模式为闭链结构,负载能力较大。此机器人在整体倾倒后可以通过机构的特点恢复腿式和轮式模式,相比于一般的闭链腿式机器人,具有很好的倾翻自救性能。
奖项:全国三等奖

团队名称:翻山越岭队
作品名称:躯干可变形的平顺行走多足平台
指导教师:武建昫
队员:姬佳璐、张宇航、张鑫、寇帅
作品介绍:躯干部采用空间单闭环8R机构,利用躯干变形重构丰富足式移动平台的步态模式,行走部采用单自由度闭链腿机构,通过与凸轮补偿机构结合,实现整机竖直位移与水平速度补偿,有效增强了机身运动的平顺性。少自由度躯干与单自由度腿机构的结合,使用较少的驱动实现多样的变形,具有转向、俯仰攀爬和容错功能,且具有良好的越障性能。
奖项:全国三等奖


本届中国研究生机器人创新设计大赛重视研究生创新实践能力,引导广大高校学生积极面向世界科技前沿,面向经济主战场,面向国家重大需求,面向人民生命健康,不断向科学技术广度和深度进军。希望更多同学关注研究生创新实践系列竞赛,积极参赛。明年的荣誉榜上,我们期待你的上榜!